手術支援ロボット「ダヴィンチ Xi」について
手術支援ロボット「ダヴィンチ」とは?

高倍率3D HD手術画像により、術者が覗き込むモニターには立体的な術野の拡大画像が鮮明に映しだされます。また、ダヴィンチの専用インストゥルメント(鉗子)は人間の手よりも大きな可動域を持つため、より複雑かつ繊細な動きを要する手術を可能にします。さらに、搭載されているソフトウェアが術者の手ぶれも補正するため、より安定した自然な動きで手術を行うことが可能です。
ダヴィンチは執刀医の手の動きを再現するもので、機械が勝手に作動することはありません。外科医がダヴィンチを操作すると、システムは外科医の手の動きを患者様の体内にあるインストゥルメントを経由して、より細かく精緻な動きに変換します。
*患者様の負担が少ない腹腔鏡手術と同じように、いくつかの小さな切開部を作り、外科医の操作に従って内視鏡・メス・鉗子を動かして行う内視鏡手術です。
「ダヴィンチXi」導入
この度当院において、アメリカのIntuitive Surgical(インテュイティブサージカル)社が開発した手術支援用のロボット「ダヴィンチXi」を導入致しました。医師・看護師・臨床工学士などによる手術チームにて規定のトレーニングコースを受講し、施術に必要な教育・訓練を十分に受け、ライセンスを取得しました。2021年5月に1例目として泌尿器科領域における前立腺症例の手術を実施、以降は部分腎切除や外科領域における大腸・胃・肺、婦人科領域へと適応を拡げダヴィンチによる手術実績を重ねております。ダヴィンチ Xiは、前世代のシステムに比べ機能が充実し、より複雑で難しい手術に対する低侵襲手術の可能性がさらに広がるシステムです。
アクセス性・可動域の大幅な向上を実現

アーム構造
- 新しいオーバーヘッド・インストゥルメント・アーム構造が採用され、腹部および胸部で手術部位へさまざまな角度からアクセスが容易になりました。
- 一段と細径化したロボットアームと新デザインの関節により、患者様との距離を最適化しながら、より大きな可動域を実現しました。また、インストゥルメントのシャフト長も延長され、手術可能な範囲を拡大しています。
-

ロボットアーム
-
エルゴノミクス設定
より高倍率な3D HD手術画像と新エンドスコープが視野展開の多様化を実現
- 今までは専用カメラアームのみに装着可能であったエンドスコープが、すべてのアームに装着できるようになり、容易に広範囲に術野展開することが可能になりました。
- エンドスコープに新たなデジタル構造を採用し、カメラヘッドを一体化したシンプルでコンパクトなデザインでありながら、画質と操作性の向上を実現しました。
-

高解像度3D画像
-

サージョンコンソール
ダヴィンチの仕組み
手術支援ロボット「ダヴィンチ」は、大きくわけて3つのユニットで構成されます。
ペイシェントカート(Patient Cart:ロボット部)
医師の手の動きを正確かつ繊細に再現して、手術を行うのがペイシェントカートです。
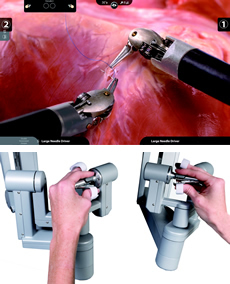
ペイシェントカートの鉗子には人間のように関節があり、従来の腹腔鏡手術では不可能だった人間の手のような動き(手首や指などの複数の関節の連動)が可能です。
手術操作は医師が行い、ロボットはその動きを繊細に正確に再現するよう支援します。
ペイシェントカートの鉗子には人間のように関節があり、従来の腹腔鏡手術では不可能だった人間の手のような動き(手首や指などの複数の関節の連動)が可能です。
手術操作は医師が行い、ロボットはその動きを繊細に正確に再現するよう支援します。

「ダヴィンチXi」のペイシェントカート(本体)
カメラと4本のロボットアームで構成されています。
-

-

当院の「ダヴィンチXi」による手術中の風景
サージョンコンソール(Surgeon Console:操作部)

サージョンコンソール
医師がペイシェントカートの鉗子を操作する操縦台です。
手術野を10倍まで拡大することが可能な高解像度3次元立体画像を見ながら、両手で「ダ・ヴィンチXi」を操作します。
画像が3次元化されたことで従来の腹腔鏡下手術と違い、奥行きを読み取って鉗子を動かすことができるようになりました。
またズーム機能により、今まで確認が困難だった微細な血管や神経が確認できるようになり、より正確かつ安全に手術を行うことが可能になりました。
手術野を10倍まで拡大することが可能な高解像度3次元立体画像を見ながら、両手で「ダ・ヴィンチXi」を操作します。
画像が3次元化されたことで従来の腹腔鏡下手術と違い、奥行きを読み取って鉗子を動かすことができるようになりました。
またズーム機能により、今まで確認が困難だった微細な血管や神経が確認できるようになり、より正確かつ安全に手術を行うことが可能になりました。
-
-

モーションスケール対応
人の動作を縮小して伝えるモーションスケールに対応しています。例えば、術者が手を6cm動かしても、鉗子は2cmしか動きませんので、血管の縫合や切除などの細かい作業に威力を発揮します。
ヴィジョンカート(Vision Cart:モニター部)

ヴィジョンカート
「ダヴィンチXi」を操作する医師以外のスタッフは、このヴィジョンカートのモニターを見ながら手術をサポートします。
患者様の治療に使用される鉗子やカメラなどの状態は、ダ・ヴィンチのスタッフが把握して術者に伝えます。
術者はケーブルでつながった操作台に座り、中に映し出されるハイビジョン3次元立体画像を見ながら3本のアームを操り、手術(患部の剥離、切除、縫合など)を行います。
患者様の治療に使用される鉗子やカメラなどの状態は、ダ・ヴィンチのスタッフが把握して術者に伝えます。
術者はケーブルでつながった操作台に座り、中に映し出されるハイビジョン3次元立体画像を見ながら3本のアームを操り、手術(患部の剥離、切除、縫合など)を行います。
その他
ヒルロム手術台

E100ジェネレータ
「ダヴィンチXi」に搭載される最新のジェネレータE-100が提供するスピード・精密性・多機能性は、手術の効率性向上に貢献します。